3D-printed Soft Microrobot for Swimming in Biological Fluids
2015
Conference Paper
pf
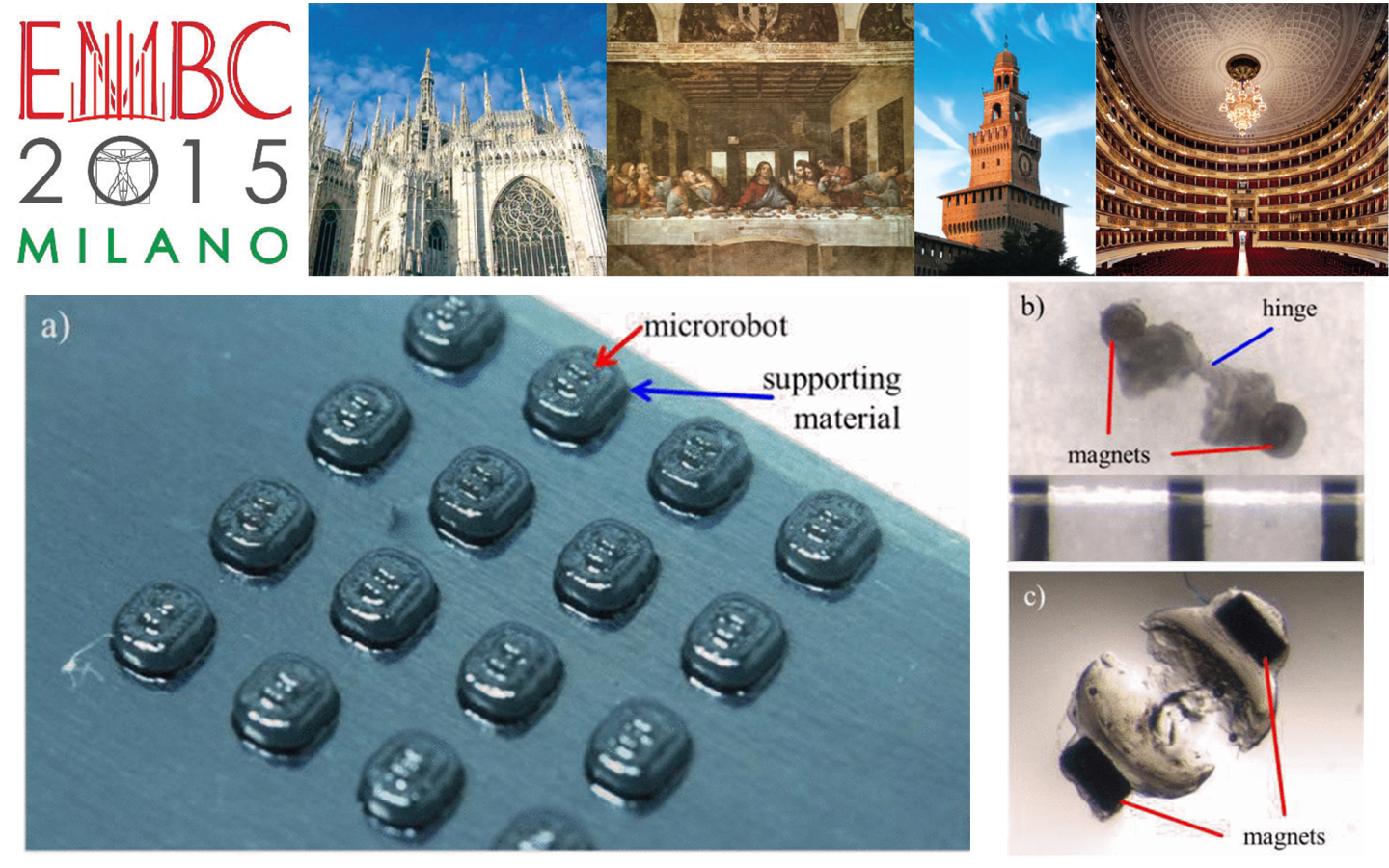
Microscopic artificial swimmers hold the potential to enable novel non-invasive medical procedures. In order to ease their translation towards real biomedical applications, simpler designs as well as cheaper yet more reliable materials and fabrication processes should be adopted, provided that the functionality of the microrobots can be kept. A simple single-hinge design could already enable microswimming in non-Newtonian fluids, which most bodily fluids are. Here, we address the fabrication of such single-hinge microrobots with a 3D-printed soft material. Firstly, a finite element model is developed to investigate the deformability of the 3D-printed microstructure under typical values of the actuating magnetic fields. Then the microstructures are fabricated by direct 3D-printing of a soft material and their swimming performances are evaluated. The speeds achieved with the 3D-printed microrobots are comparable to those obtained in previous work with complex fabrication procedures, thus showing great promise for 3D-printed microrobots to be operated in biological fluids.
| Author(s): | Qiu, Tian and Palagi, Stefano and Fischer, Peer |
| Book Title: | Conf. Proc. IEEE Eng. Med. Biol. Soc. |
| Pages: | 4922-4925 |
| Year: | 2015 |
| Month: | August |
| Department(s): | Micro, Nano, and Molecular Systems |
| Bibtex Type: | Conference Paper (inproceedings) |
| DOI: | 10.1109/EMBC.2015.7319496 |
| Address: | Piscataway, NJ, USA |
| State: | Published |
| URL: | https://ieeexplore.ieee.org/stamp/stamp.jsp?arnumber=7319496 |
|
BibTex @inproceedings{2015qiu,
title = {3D-printed Soft Microrobot for Swimming in Biological Fluids},
author = {Qiu, Tian and Palagi, Stefano and Fischer, Peer},
booktitle = {Conf. Proc. IEEE Eng. Med. Biol. Soc.},
pages = {4922-4925},
address = {Piscataway, NJ, USA},
month = aug,
year = {2015},
doi = {10.1109/EMBC.2015.7319496},
url = {https://ieeexplore.ieee.org/stamp/stamp.jsp?arnumber=7319496},
month_numeric = {8}
}
|
|