Soft Miniaturized Linear Actuators Wirelessly Powered by Rotating Permanent Magnets
2018
Conference Paper
pf
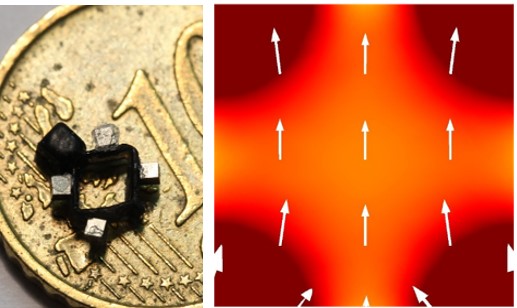
Wireless actuation by magnetic fields allows for the operation of untethered miniaturized devices, e.g. in biomedical applications. Nevertheless, generating large controlled forces over relatively large distances is challenging. Magnetic torques are easier to generate and control, but they are not always suitable for the tasks at hand. Moreover, strong magnetic fields are required to generate a sufficient torque, which are difficult to achieve with electromagnets. Here, we demonstrate a soft miniaturized actuator that transforms an externally applied magnetic torque into a controlled linear force. We report the design, fabrication and characterization of both the actuator and the magnetic field generator. We show that the magnet assembly, which is based on a set of rotating permanent magnets, can generate strong controlled oscillating fields over a relatively large workspace. The actuator, which is 3D-printed, can lift a load of more than 40 times its weight. Finally, we show that the actuator can be further miniaturized, paving the way towards strong, wirelessly powered microactuators.
| Author(s): | Qiu, Tian and Palagi, Stefano and Sachs, Johannes and Fischer, Peer |
| Book Title: | 2018 IEEE International Conference on Robotics and Automation (ICRA) |
| Journal: | 2018 IEEE International Conference on Robotics and Automation (ICRA) |
| Pages: | 3595-3600 |
| Year: | 2018 |
| Month: | May |
| Department(s): | Micro, Nano, and Molecular Systems |
| Bibtex Type: | Conference Paper (inproceedings) |
| Paper Type: | Conference |
| DOI: | 10.1109/ICRA.2018.8461145 |
| Address: | Piscataway, NJ, USA |
| State: | Published |
| URL: | https://ieeexplore.ieee.org/document/8461145 |
|
BibTex @inproceedings{2018qiu4,
title = {Soft Miniaturized Linear Actuators Wirelessly Powered by Rotating Permanent Magnets},
author = {Qiu, Tian and Palagi, Stefano and Sachs, Johannes and Fischer, Peer},
journal = {2018 IEEE International Conference on Robotics and Automation (ICRA)},
booktitle = {2018 IEEE International Conference on Robotics and Automation (ICRA)},
pages = {3595-3600},
address = {Piscataway, NJ, USA},
month = may,
year = {2018},
doi = { 10.1109/ICRA.2018.8461145},
url = {https://ieeexplore.ieee.org/document/8461145},
month_numeric = {5}
}
|
|