2022
Magnetic Micro-/Nanopropellers for Biomedicine
Qiu, T., Jeong, M., Goyal, R., Kadiri, V., Sachs, J., Fischer, P.
In Field-Driven Micro and Nanorobots for Biology and Medicine, pages: 389-410, 16, (Editors: Sun, Y. and Wang, X. and Yu, J.), Springer, Cham, 2022 (inbook)
2021
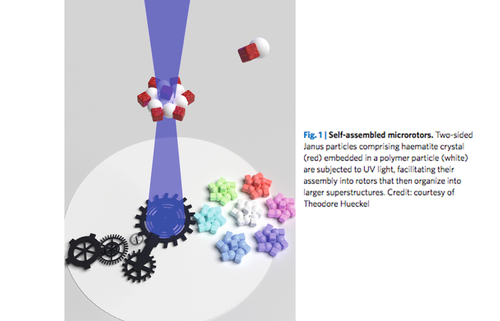
Chemically active micromotors
Advanced Diffusion Studies of Active Enzymes and Nanosystems
2020

Motion, Symmetry & Spectroscopy of Chiral Nanostructures
Evaluation of nanorobots for targeted delivery into the retina
Schnichels, S., Goyal, R., Hurst, F., Ziemsen, F., Qiu, T., Fischer, P.
61, pages: 1355, Investigative Ophthalmology & Visual Science,The Association for Research in Vision and Ophthalmology, June 2020 (conference)
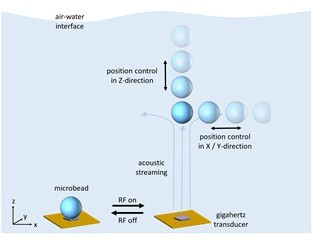
Acoustofluidic Tweezers for the 3D Manipulation of Microparticles
Guo, X., Ma, Z., Goyal, R., Jeong, M., Pang, W., Fischer, P., Dian, X., Qiu, T.
2020 IEEE International Conference on Robotics and Automation (ICRA 2020), pages: 11392-11397, IEEE, Piscataway, NJ, IEEE International Conference on Robotics and Automation (ICRA 2020), 2020 (conference)

Soft Microrobots Based on Photoresponsive Materials
2019
Soft Continuous Surface for Micromanipulation driven by Light-controlled Hydrogels
Choi, E., Jeong, H., Qiu, T., Fischer, P., Palagi, S.
4th IEEE International Conference on Manipulation, Automation and Robotics at Small Scales (MARSS), July 2019 (conference)
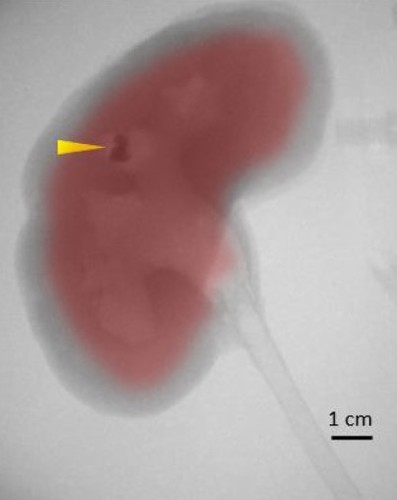
Soft Phantom for the Training of Renal Calculi Diagnostics and Lithotripsy
Li., D., Suarez-Ibarrola, R., Choi, E., Jeong, M., Gratzke, C., Miernik, A., Fischer, P., Qiu, T.
41st Annual International Conference of the IEEE Engineering in Medicine & Biology Society (EMBC), July 2019 (conference)
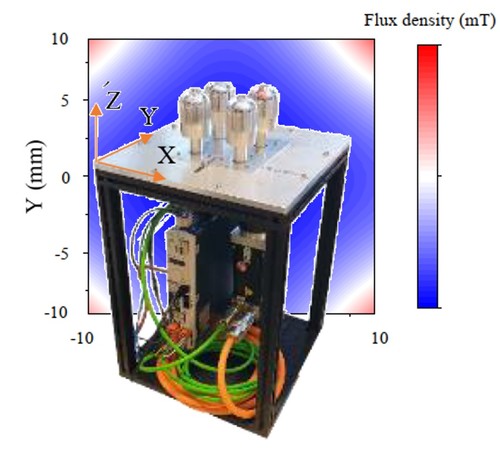
A Magnetic Actuation System for the Active Microrheology in Soft Biomaterials
Jeong, M., Choi, E., Li., D., Palagi, S., Fischer, P., Qiu, T.
4th IEEE International Conference on Manipulation, Automation and Robotics at Small Scales (MARSS), July 2019 (conference)
The acoustic hologram and particle manipulation with structured acoustic fields
Dynamics of self-propelled colloids and their application as active matter
2018
Gait learning for soft microrobots controlled by light fields
Rohr, A. V., Trimpe, S., Marco, A., Fischer, P., Palagi, S.
In International Conference on Intelligent Robots and Systems (IROS) 2018, pages: 6199-6206, Piscataway, NJ, USA, International Conference on Intelligent Robots and Systems 2018, October 2018 (inproceedings)
Nanoscale robotic agents in biological fluids and tissues
Palagi, S., Walker, D. Q. T., Fischer, P.
In The Encyclopedia of Medical Robotics, 2, pages: 19-42, 2, (Editors: Desai, J. P. and Ferreira, A.), World Scientific, October 2018 (inbook)
Colloidal Chemical Nanomotors
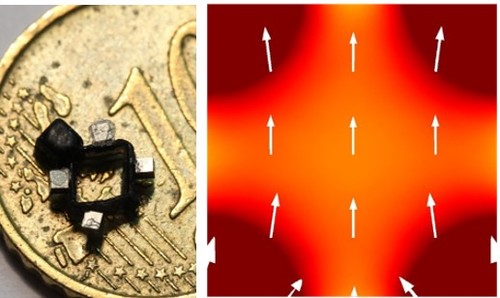
Soft Miniaturized Linear Actuators Wirelessly Powered by Rotating Permanent Magnets
Qiu, T., Palagi, S., Sachs, J., Fischer, P.
In 2018 IEEE International Conference on Robotics and Automation (ICRA), 2018 IEEE International Conference on Robotics and Automation (ICRA), pages: 3595-3600, Piscataway, NJ, USA, May 2018 (inproceedings)
Nanorobots propel through the eye
Wu, Z., Troll, J., Jeong, H., Qiang, W., Stang, M., Ziemssen, F., Wang, Z., Dong, M., Schnichels, S., Qiu, T., Fischer, P.
Max Planck Society, 2018 (mpi_year_book)
2017
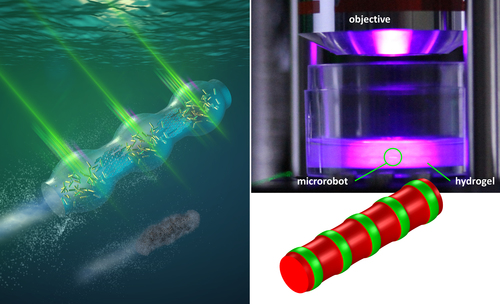
Locomotion of light-driven soft microrobots through a hydrogel via local melting
Palagi, S., Mark, A. G., Melde, K., Qiu, T., Zeng, H., Parmeggiani, C., Martella, D., Wiersma, D. S., Fischer, P.
In 2017 International Conference on Manipulation, Automation and Robotics at Small Scales (MARSS), pages: 1-5, Piscataway, NJ, USA, July 2017 (inproceedings)
Programmable chiral nanocolloids

A Wirelessly Actuated Robotic Arm for Endoscopy
Qiu, T., Palagi, S., Adams, F., Wetterauer, U., Miernik, A., Fischer, P.
pages: 29, The Hamlyn Symposium on Medical Robotics, June 2017 (conference)
Chapter 8 - Micro- and nanorobots in Newtonian and biological viscoelastic fluids
Palagi, S., (Walker) Schamel, D., Qiu, T., Fischer, P.
In Microbiorobotics, pages: 133 - 162, 8, Micro and Nano Technologies, Second edition, Elsevier, Boston, March 2017 (incollection)
Wireless micro-robots for endoscopic applications in urology
Adams, F., Qiu, T., Mark, A. G., Melde, K., Palagi, S., Miernik, A., Fischer, P.
In Eur Urol Suppl, 16(3):e1914, March 2017 (inproceedings)
Akustische Hologramme steuern Partikel
Melde, K., Qiu, T., Mar, A., Fischer, P.
January 2017 (misc)
2016
Soft continuous microrobots with multiple intrinsic degrees of freedom
Palagi, S., Mark, A. G., Melde, K., Zeng, H., Parmeggiani, C., Martella, D., Wiersma, D. S., Fischer, P.
In 2016 International Conference on Manipulation, Automation and Robotics at Small Scales (MARSS), pages: 1-5, Piscataway, NJ, USA, July 2016 (inproceedings)
Wireless actuator based on ultrasonic bubble streaming
Qiu, T., Palagi, S., Mark, A. G., Melde, K., Fischer, P.
In 2016 International Conference on Manipulation, Automation and Robotics at Small Scales (MARSS), pages: 1-5, Piscataway, NJ, USA, July 2016 (inproceedings)
Auxetic Metamaterial Simplifies Soft Robot Design
Mark, A. G., Palagi, S., Qiu, T., Fischer, P.
In 2016 IEEE Int. Conf. on Robotics and Automation (ICRA), pages: 4951-4956, Piscataway, NJ, USA, May 2016 (inproceedings)

Chiral Metamaterials
Towards Photo-Induced Swimming: Actuation of Liquid Crystalline Elastomer in Water
cerretti, G., Martella, D., Zeng, H., Parmeggiani, C., Palagi, S., Mark, A. G., Melde, K., Qiu, T., Fischer, P., Wiersma, D.
In Proc. of SPIE 9738, pages: Laser 3D Manufacturing III, 97380T, Bellingham, Washington, April 2016 (inproceedings)

Microdevices for Locomotion in Complex Biological Fluids
2015
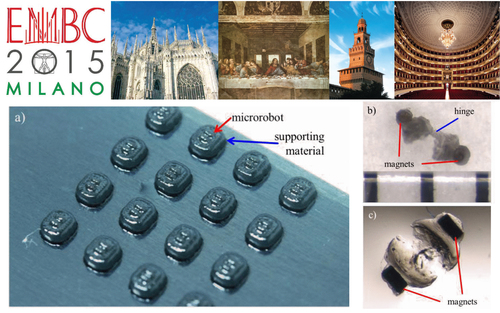
3D-printed Soft Microrobot for Swimming in Biological Fluids
Qiu, T., Palagi, S., Fischer, P.
In Conf. Proc. IEEE Eng. Med. Biol. Soc., pages: 4922-4925, Piscataway, NJ, USA, August 2015 (inproceedings)
2014
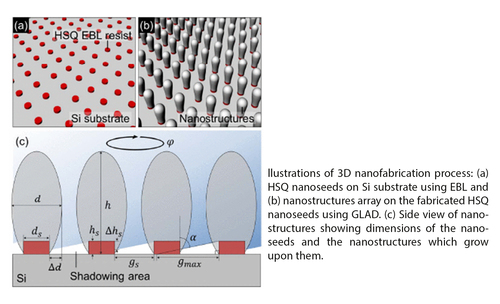
3D nanofabrication on complex seed shapes using glancing angle deposition
Hyeon-Ho, J., Mark, A. G., Gibbs, J. G., Reindl, T., Waizmann, U., Weis, J., Fischer, P.
In 2014 IEEE 27th International Conference on Micro Electro Mechanical Systems (MEMS), pages: 437-440, Piscataway, NJ, USA, January 2014 (inproceedings)

Active Microrheology of the Vitreous of the Eye applied to Nanorobot Propulsion
Qiu, T., Schamel, D., Mark, A. G., Fischer, P.
In 2014 IEEE INTERNATIONAL CONFERENCE ON ROBOTICS AND AUTOMATION (ICRA), pages: 3801-3806, IEEE International Conference on Robotics and Automation ICRA, Piscataway, NJ, USA, 2014, Best Automation Paper Award – Finalist. (inproceedings)
Best Automation Paper Award – Finalist.
2006
NONLINEAR OPTICAL PROPERTIES OF CHIRAL LIQUIDS Electric-dipolar pseudoscalars in nonlinear optics
Fischer, P., Champagne, B.
In NON-LINEAR OPTICAL PROPERTIES OF MATTER: FROM MOLECULES TO CONDENSED PHASES, 1, pages: 359-381, Challenges and Advances in Computational Chemistry and Physics, 2006 (incollection)