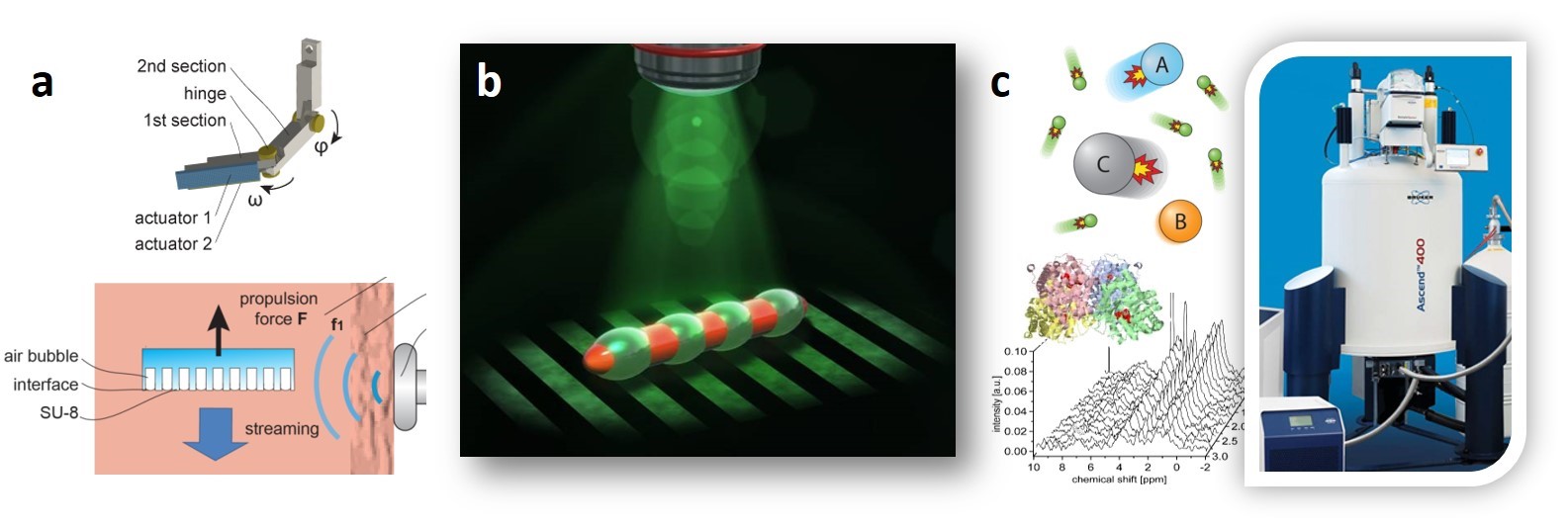
a) A surface containing microbubbles is excited with ultrasound and the recoil force moves a micro-robot arm. The actuator has many degrees of freedom – each surface has an array of bubbles with an unique size. b) A light actuated liquid crystal elastomer swims when the light-pattern excites a metachronal wave. c) It has been claimed that enzymes and molecules show enhanced motion (swimming) when they are catalytically active. Our precision measurements were able to address this fundamental question.
Problem: Actuation and motion of sub-mm devices and structures is challenging because it is difficult to transfer energy to small scales. In addition, reciprocal actuation does not lead propulsion at low Reynolds numbers. New effective actuation mechanisms are needed for minimally invasive medical procedures as this relates to fundamental questions in chemistry.
A multi-degree of freedom wireless micro-robot arm: Endoscopy enables minimally invasive procedures in many medical fields, such as urology. However, current endoscopes are normally cable-driven, with an outer diameter of about 3 mm and only one bending degree of freedom. To avoid anesthesia in these procedures, it would be advantageous to develop an endoscopic camera arm that needs no cables or wires. This calls for a new kind of actuator. Our patented idea is to design functional surfaces that are excited by ultrasound to directly generate a force. We fabricate surfaces that contain thousands of resonant microbubbles and exploit acoustic streaming, which we show can actuate a 1 mm robot arm (Figure). We used our actuator to successfully move a mm-sized Naneye camera in a rabbit bladder ex vivo [ ].
Smallest micro-swimmer: A major challenge in robotics is the development of actuation schemes that mimic the versatility of biological locomotion. This is especially important at the micro-scale where traditional actuators are not feasible [ ]. Microorganisms perform sophisticated periodic body-shape changes, e.g. they beat cilia to generate metachronal waves. We developed the first fully-artificial swimming micro-robot capable of self-propulsion (no external forces or torques). In an international collaboration, we implemented multiple gaits (mimicking either symplectic or antiplectic metachrony of ciliate protozoa) in soft micro-robots made from liquid crystal elastomers, which show a fast phase transition under illumination. The LCE actuation scheme is quite general [ ] and can be optimized with learning [ ]. The work appeared in Nature Materials and is an ISI highly cited paper [ ].
Fundamental studies on nano-swimmers: Chemical reactions on the surface of microparticles can cause local concentration gradients, which causes fluid flow around the particle. Momentum conservation requires that the particle moves in the direction opposite to these flows. This form of “active matter” is known as chemical motors, which can autonomously swim and self-organize [ ]. Several publications have claimed that these concepts extend to enzymes and molecules, and have reported enhanced diffusion in catalytically active molecules. Such a mechanism would have major implications for biochemistry. We used advanced fluorescence correlation spectroscopic techniques and pulsed-field gradient NMR to show that there is no enhanced diffusion [ ].