
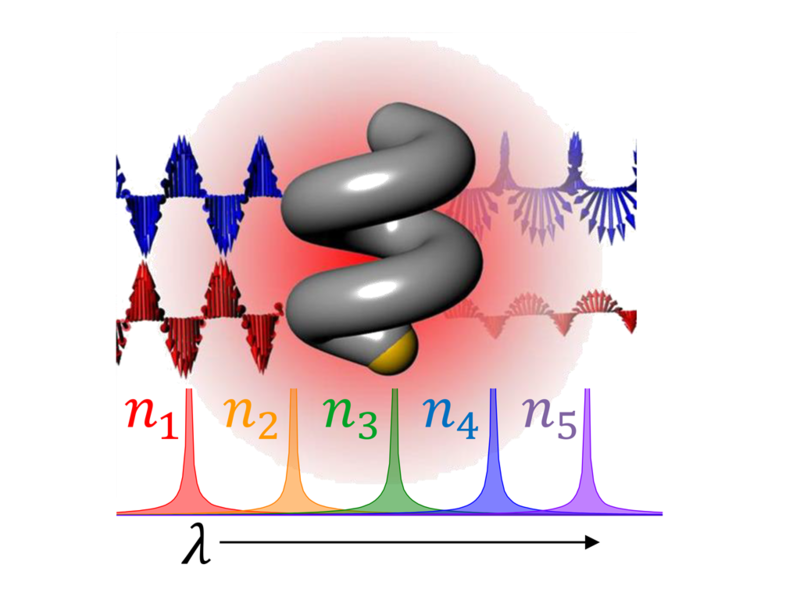
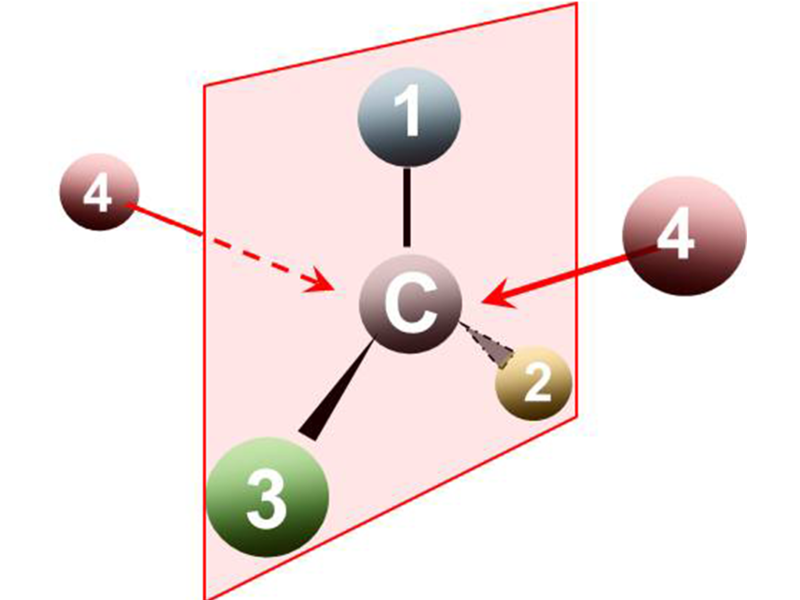
True chirality of a single nanoparticle measured for the first time
We have succeeded in taking polarization-resolved spectra of one single nanoparticle that is moving freely in bulk solution away from a surface, due to Brownian motion. This allowed us to measure a novel observable: The true chiral spectral signature of a single nanoparticle. We could show that in our measurement all polarization artefacts average to zero. It is the first demonstration of the ergodic hypothesis for chiroptical spectroscopy: watching one nanoparticle while it reorients over time is the same as a measurement on billions of nanoparticles in solution. The latter requires much larger sample volumes and averages out the dynamics of individual particles. Thus, our work brings the power of single molecule techniques to single nanoparticle spectroscopy, and appears in Nature Communications, 11: 4513, (2020). Nat. Comm. Editor’s Highlight.
Link:
https://doi.org/10.1038/s41467-020-18166-5
Max Planck press release:
https://pf.is.mpg.de/news/detecting-the-handedness-of-a-single-nanoparticle
Surgery on first human-like prostate phantom
We realized the first high-fidelity prostate phantom on which a complete prostate resection could be performed and quantitatively evaluated. The skill of the surgeon can be clearly visualized using medical ultrasound and the cut could be reconstructed using computer vision, which provides useful feedback. The technology is general and the lab has developed additional organ models, including for the kidney, bladder and liver. Apart from training, the organ models are used to test new medical microdevices and surgical robots. The work is published in the journal Annals Biomedical Engineering (2019).
Link:
https://doi.org/10.1007/s10439-019-02361-7
Max Planck press release:
https://pf.is.mpg.de/news/endoscopic-prostate-surgery-performed-on-a-first-human-like-phantom
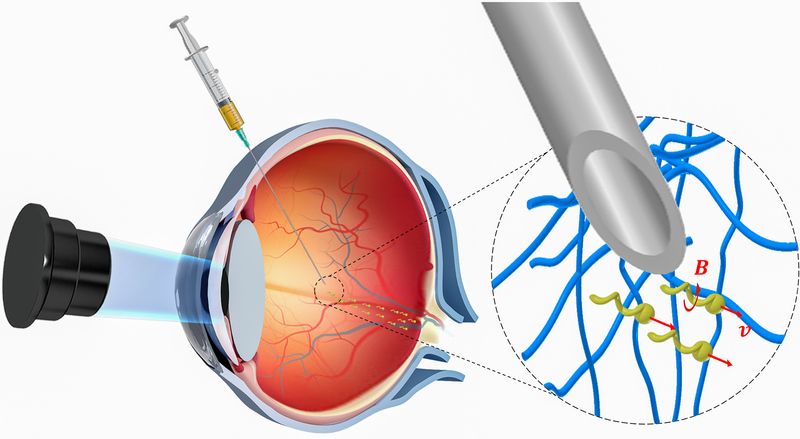
First nanorobotic system in real tissue
Targeted delivery through dense biological tissue, such as the vitreous of the eye, is very challenging. The tight matrix of biomolecules acts as a mechanical barrier and prevents its penetration. The chemical properties of the biopolymeric network in the eye serve as another barrier and causes particles to become stuck. We have fabricated nanopropellers that are small enough to squeeze through the molecular mesh and have applied a special omniphobic liquid coating so that they can be propelled over centimeter distances. The work is published in the journal Science Advances and shows how a swarm of tens of thousands of nanopropellers is moved to a small region on the retina and imaged using a standard clinical imaging tool. Science Advances 4 (11):eaat4388, 2018.
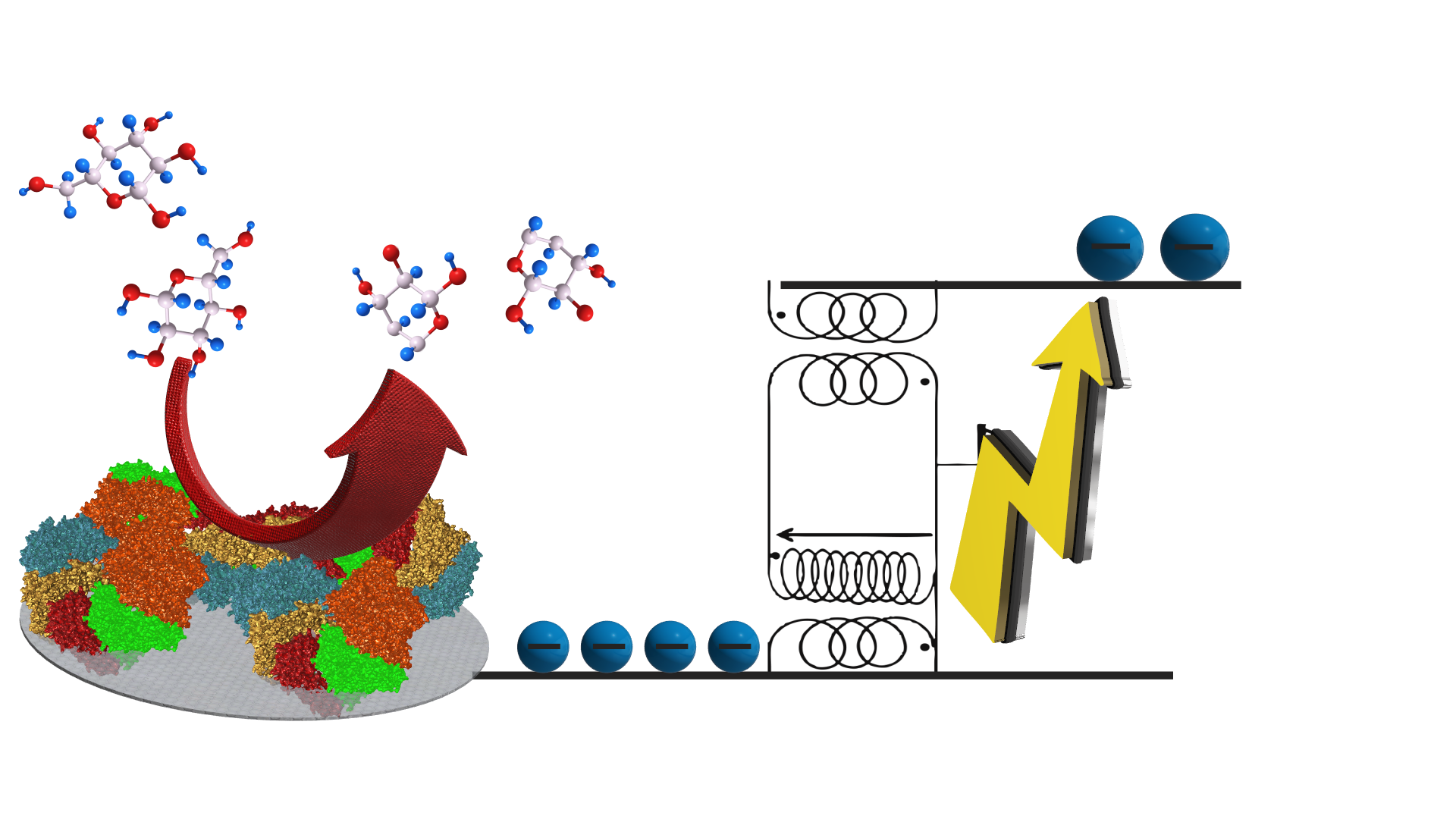
Beating thermodynamics
Only when the free enthalpy (Gibbs energy) is negative can a chemical reaction proceed spontaneously. This sets fundamental limits on the energy that can be obtained from a reaction. Together with colleagues from Bordeaux we show that it is possible for a ‘normally forbidden’ reaction to nevertheless proceed spontaneously. We overcome the limits set by thermodynamics by first storing the energy released in many spontaneous enzyme reactions and then use the bundled energy to drive a second reaction that needs more energy and would therefore not proceed spontaneously. The work is published in the journal Nature Communications and shows how it becomes possible to use abundant, simple enzyme reactions to power energy-hungry reactions and biofuel cells. Nature Communications, 9(1):3229, 2018.

The first hologram for sound
We have developed the concept of acoustic holograms. These are diffractive elements that store arbitrary acoustic wave fronts in the surface profile of a monolithic plate. By insertion in transmission or reflection geometries they shape the sound fields of single transducers to project arbitrary, complex sound fields in three dimensions. Using a 3D printer to make these holograms we achieve several orders of magnitude higher information content (pixel count) compared to commercial phased array transducer systems for ultrasound in the MHz range. We demonstrated how this opens new routes for contact free particle manipulation in liquid or air. [Nature 537, 518-522, doi:10.1038/nature19755]
"Holograms for acoustics"
Kai Melde, Andrew G. Mark, Tian Qiu, Peer Fischer
Nature, 537, 518–522 (2016)
Max Planck press release, Nature News & Views, Nature Video
The most sensitive plasmonic nanocolloids to date
Plasmonic nanoparticles hold great promise as local sensors for in situ and in vivo applications. However, the local surface plasmon resonance (LSPR) sensitivity has been so far insufficient for any practical use in medical applications. We have achieved record sensitivities and figures of merit with engineered plasmonic nanoparticles through two innovations: by introducing a chiral shape and through engineering the material dispersion. The nanocolloids show polarisation-dependent extinction spectra rich in spectral features. When the medium surrounding the particle changes, large shifts are induced that can be readily tracked, even in complex biological media with strong background absorption [Nature Communications 7, 11331 (2016)].
Biomimetic soft microrobot powered by light
We have developed the first artificial microrobot that swims with body-shape changes. The microrobot’s body is one continuous elastomer, but can be selectively actuated with light, such that it can give rise to sophisticated deformations. In this way we developed the first microswimmer that self-propels by generating travelling-wave motions without external forces or torques. The microrobots are versatile and capable of different locomotion behaviours. The actuation principle is general and opens up new possibilities for advanced microrobotic technologies. [Nature Materials 15, 647–653 (2016)
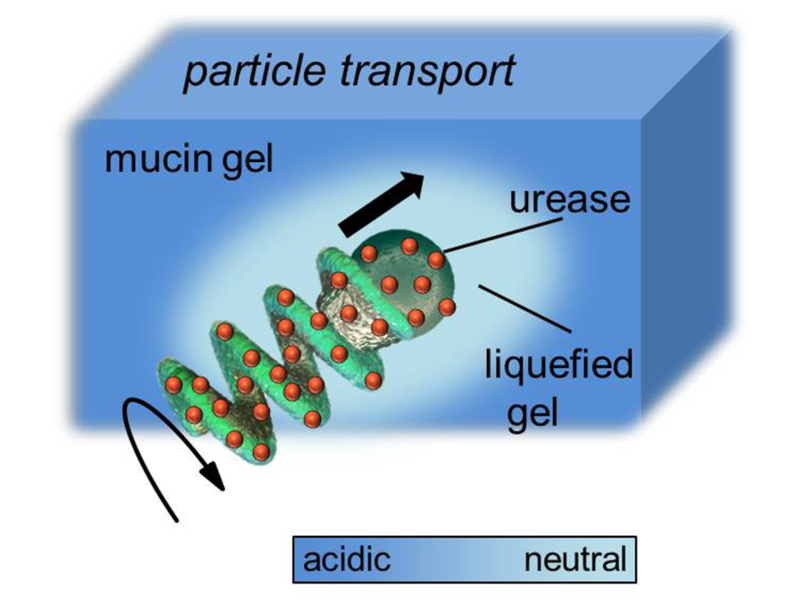
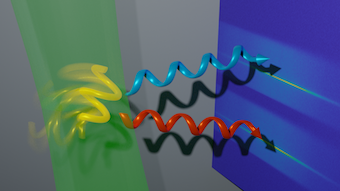
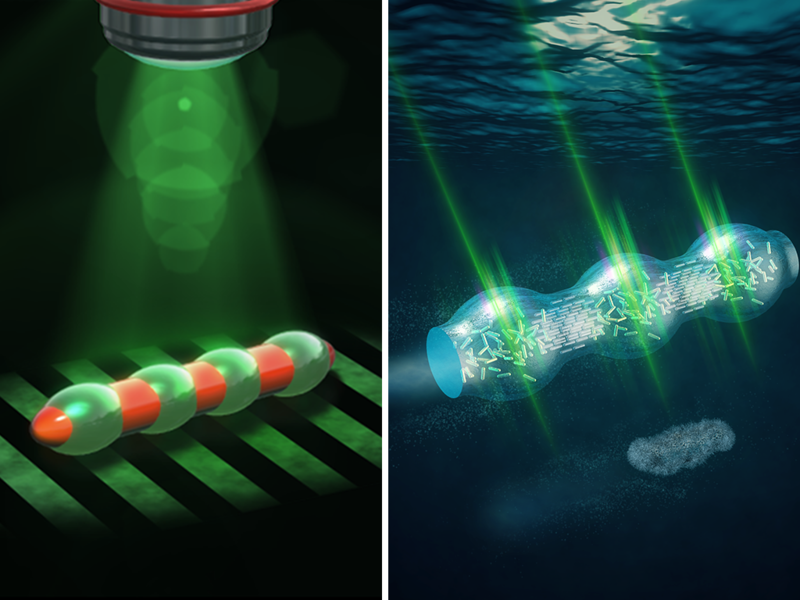
Biochemical mimicry to penetrate mucus
In the body, mucus provides an important defense mechanism against invading pathogens. It is therefore also a major obstacle for the efficient delivery of particle-based drug carriers. We have developed chemically active micropropellers that mimic the strategy of the bacterium Helicobacter pylori to move through mucin gels, by enzymatically liquefying the gel-forming component responsible for the stomach lining’s barrier properties. [Science Advances Vol. 1, no. 11, e1500501 (2015)].
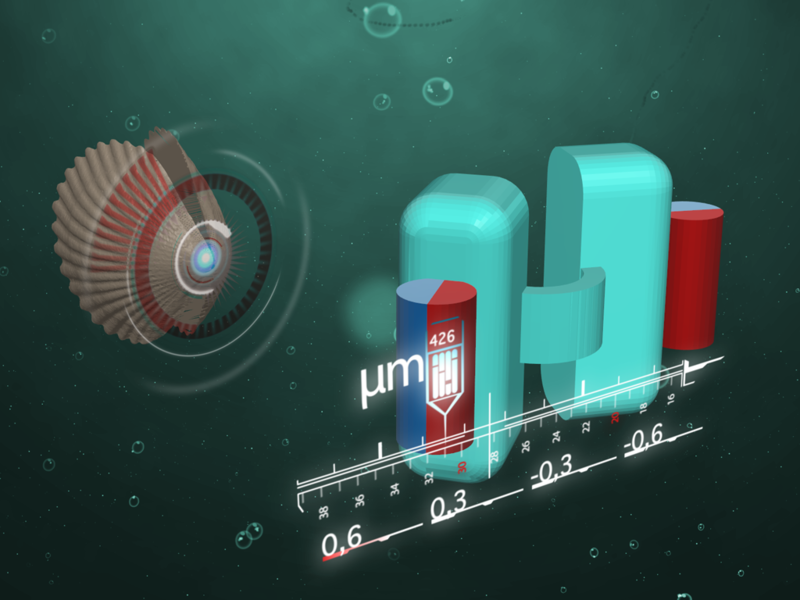
Micro-scallop that swims in biological media
Building and operating microdevices that can navigate in biomedical fluids and tissue is one of the ultimate goals of microrobotics. Realising artificial microswimmers is, however, extremely challenging, as this is the realm of low Reynolds number hydrodynamics where the laws of physics are reciprocal, and a symmetric swimmer, such as a scallop that only opens and closes its shells, cannot propel. This is known as the Purcell’s scallop theorem, but it only applies to Newtonian fluids such as pure water. In biological (non-Newtonian) fluids the scallop theorem no longer holds, and this has allowed us to build the first microswimmer, a microscallop, that can move wirelessly with symmetric body shape changes. The significance is that this opens new possibilities in designing biomedical micro-devices, as most actuators give rise to reciprocal shape changes. [Nature Communications 5, 5119, (2014)].
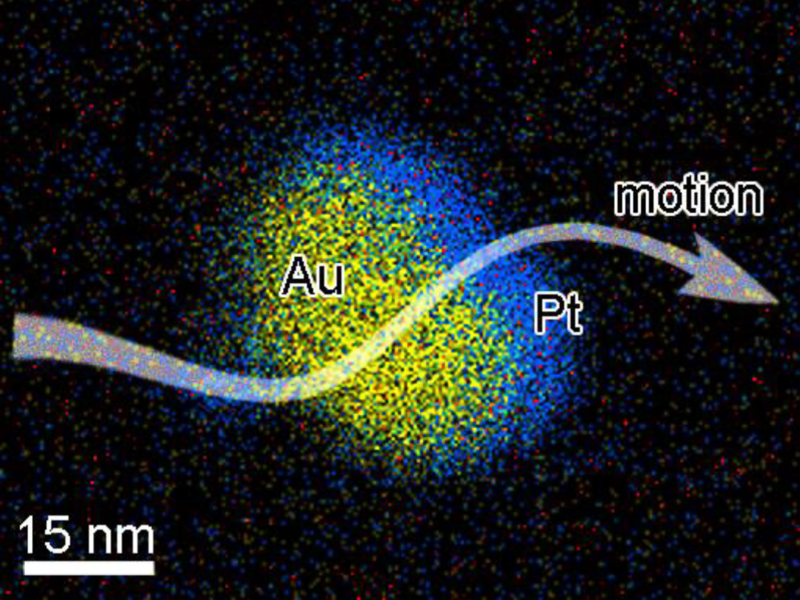
Smallest artificial chemical nanomotor
We have shown that Janus nanostructures that are as small as an enzyme can be propelled when they are catalytically active. The inclusion of platinum in the Pt-Au Janus nanoparticles allows for the catalytic decomposition of H2O2 in solution, which causes self-electrophoresis. Having a comparable size to active enzymes, our nanomotors show enhanced diffusion, demonstrating that phoretic mechanisms of low Reynolds-number propulsion are also effective at the smallest of scales [Nano Letters 14, 2407 (2014)].
Nanofabrication of nanostructures in 3D
We have developed a parallel fabrication scheme that rapidly generates hundreds of billions of nanostructures and, unlike any other growth method, can combine multiple functional materials in one and the same complex 3D nanostructure. We can grow a wide variety of shapes from a large library of materials. This is useful, as tuning the optical, electromagnetic, and mechanical properties of nanoparticles requires control over the shape and composition, and the scheme we demonstrate allows this in a flexible and modular way. We have grown plasmonically active nanoantennas which show record optical activities [Nature Materials 12, 802, (2013)].
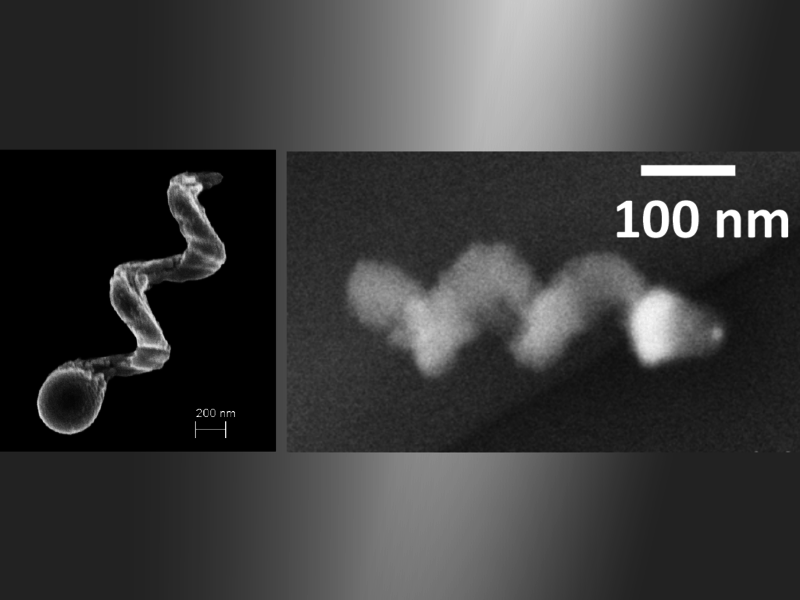
The smallest, best controlled micro- and nano-bots
We have realized the smallest fully controlled artificial “nano-bots” that have been made to date. These are glass nanopropellers that are screw-like helices just like the flagella of a bacterium. They are propelled through solution with micron-level control [Nano Lett. 9, 2243 (2009)]. The journal Nature calls it “the helix that delivers” [Nature 459, 13 (2009)]. The work has received a lot of interest with several news and press articles. Nature, Chemical & Engineering News, Condensed matter physics journal club, and in the New Scientist. Recently we have shown how to realize nanopropellers that are even smaller than bacteria and that thereby can move through the mesh of a complex biological gels and fluids [ACS Nano DOI: 10.1021/nn502360t (2014)].
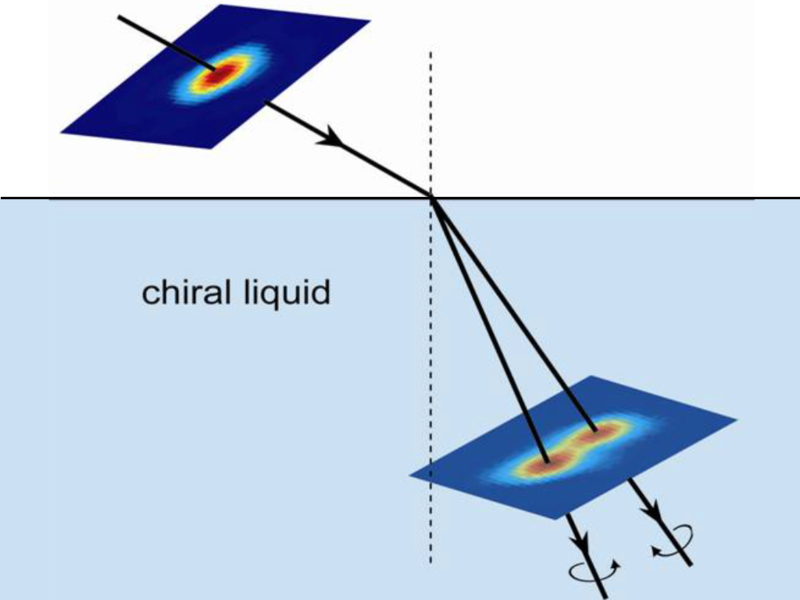
Discovery of a fundamental optical effect
For hundreds of years chiral molecules have been observed in transmission (optical rotation) requiring large liquid sample volumes. We have managed to show that one can also detect optical activity in refraction. That this effect exists was first predicted by Fresnel some 200 years ago. At a chiral interface a light beam splits into its two circular polarization components, and although the splitting is tiny, we managed to show that it permits chiral detection in microfluidic volumes [Phys. Rev. Lett. 97, 173002 (2006)]. The work is the basis of one of our patents. Recently we increased the sensitivity with “weak value amplification” to detect light splitting as small as one nanorad [Opt. Express 19, 16508 (2011)]. This work has been highlighted by the physics and news media, including in Nature Photonics, Physics Today, Frankfurter Allgemeine Zeitung, La Recherche, etc.
Absolute asymmetric synthesis
A demonstration of how it is possible to affect molecular structure simply by the way a crystal is held in a chemical synthesis. One of the highest enantiomeric excesses achieved for a purely physical asymmetric reaction scheme [Angew. Chem. Int. Ed. 48, 6857 (2009)].

The first soft-matter magneto-electric material
Maxwell’s equations teach us that a static electric field can in general not generate a static magnetic field and vice versa. Only time-varying fields can do so. However, Landau showed that crystals that are ferromagnetic and electric polar at the same time can show a magneto-electric (ME) effect, when one of the fields deforms the crystal lattice. An entirely different approach was suggested by Tellegen from the Philips research labs in 1948, who proposed that if one could make tiny electric dipoles – each “glued” to a magnet, then the application of a static electric field, would rotate the electric dipoles and hence also align all the attached magnets and thereby give rise to a magnetic field. We managed to achieve the first realization of Tellegen’s prediction and observe this ME effect with soft-matter Janus particles. The particles are simultaneously magnetic and electric dipolar and are based on the fore-runner of electronic paper developed at Xerox. [Small 4, 1956 (2008)].