2023

Multiplane Diffractive Acoustic Networks
Athanassiadis, A. G., Schlieder, L., Melde, K., Volchkov, V., Schölkopf, B., Fischer, P.
IEEE Transactions on Ultrasonics, Ferroelectrics, and Frequency Control, 70(5):441-448, IEEE, March 2023 (article)
Biomolecular actuators for genetically selective acoustic manipulation of cells
Wu, D., Baresch, D., Cook, C., Ma, Z., Duan, M., Malounda, D., Maresca, D., Abundo, M. P., Lee, J., Shivaei, S., Mittelstein, D. R., Qiu, T., Fischer, P., Shapiro, M. G.
Science Advances, 9(8):eadd9186, AAAS, Washington, 2023 (article)
2022
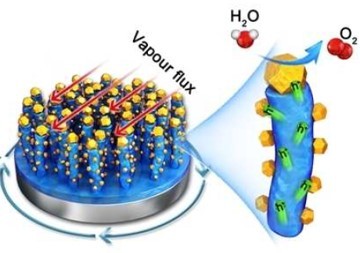
Hierarchical optofluidic microreactor for water purification using an array of TiO2 nanostructures
Kim, H., Kwon, H., Song, R., Shin, S., Ham, S., Park, H., Lee, J., Fischer, P., Bodenschatz, E.
npj Clean Water, 5, pages: 62, Macmillan Publishers Limited, Basingstoke, November 2022 (article)
Magnetic Micro-/Nanopropellers for Biomedicine
Qiu, T., Jeong, M., Goyal, R., Kadiri, V., Sachs, J., Fischer, P.
In Field-Driven Micro and Nanorobots for Biology and Medicine, pages: 389-410, 16, (Editors: Sun, Y. and Wang, X. and Yu, J.), Springer, Cham, 2022 (inbook)
Comment on “Molecules, the Ultimate Nanomotor: Linking Chemical Reaction Intermediates to their Molecular Diffusivity”
Günther, J., Fillbrook, L. L., Majer, G., O’Leary, D. J., Price, W. S., Ryswyk, H. V., Fischer, P., Beves, J. E.
ACS Nano, 16(7):9973-9976, July 2022 (article)
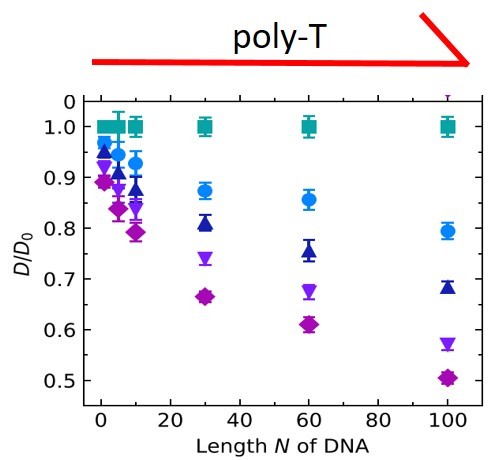
Diffusion mechanisms of DNA in agarose gels: NMR Studies and Monte Carlo Simulations
Bochert, I., Günther, J., Fischer, P., Majer, G.
The Journal of Chemical Physics, 156(24):245103, June 2022 (article)
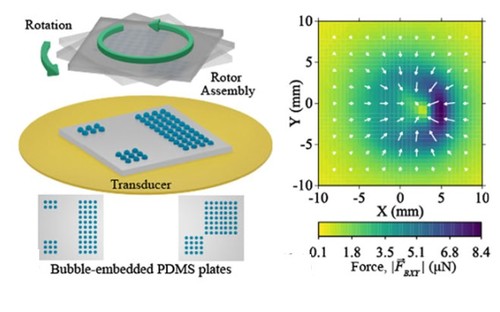
Amplification of Acoustic Forces Using Microbubble Arrays Enables Manipulation of Centimeter-Scale Objects
Goyal, R., Athanassiadis, A. G., Ma, Z., Fischer, P.
Physical Review Letters, 128(25):254502, June 2022 (article)
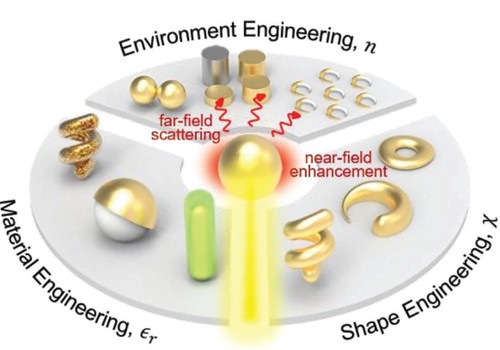
Toward Maximally Electromagnetically Chiral Scatterers at Optical Frequencies
Garcia-Santiago, X., Hammerschmidt, M., Sachs, J., Burger, S., Kwon, H., Knöller, M., Arens, T., Fischer, P., Fernandez-Corbaton, I., Rockstuhl, C.
ACS Photonics, 9(6):1954-1964, May 2022 (article)
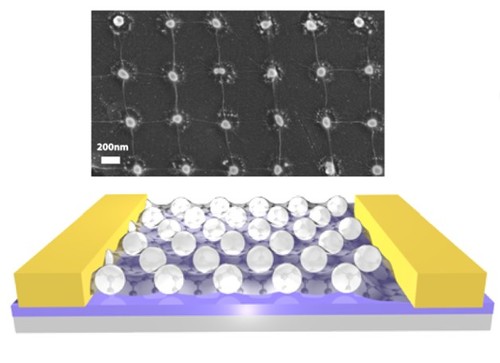
Plasmonic Nanostructure Engineering with Shadow Growth
Jang-Hwan, H., Kim, D., Kim, J., Kim, G., Fischer, P., Jeong, H.
Advanced Materials, 35(34):2107917, March 2022 (article)
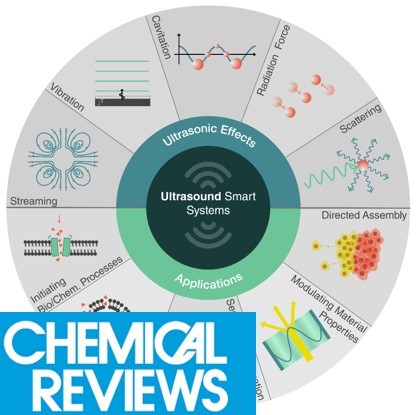
Ultrasound-responsive systems as components for smart materials
Athanassiadis, A., Ma, Z., Moreno-Gomez, N., Melde, K., Choi, E., Goyal, R., Fischer, P.
Chemical Reviews, 122(5):5165-5208, March 2022 (article)
Second harmonic Rayleigh scattering optical activity of single Ag nanohelices in a liquid
Ohnoutek, L., Olohan, B. J., Jones, R. R., Zheng, X., Jeong, H.
Nanoscale, 14(10):3888-3898, February 2022 (article)
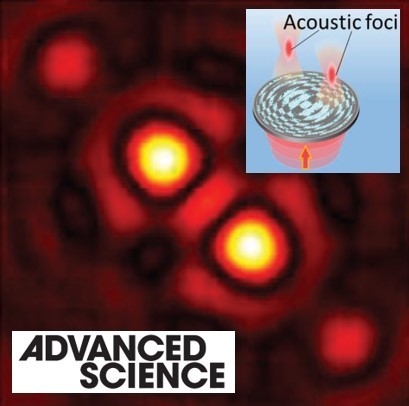
Dynamic ultrasound projector controlled by light
Ma, Z., Joh, H., Fan, E. D., Fischer, P.
Advanced Science, 9(9):2104401, January 2022 (article)
Roadmap on soft robotics: multifunctionality, adaptability and growth without borders
Mazzolai, B., Carpi, F., Suzumori, K., Cianchetti, M., Speck, T., Smoukov, S. K., Burgert, I., Keplinger, T., Siqueira, G., Vanneste, F., Goury, O., Duriez, C., Nanayakkara, T., Vanderborght, B., Brancart, J., Terryn, S., Rich, S., Liu, R., Fukuda, K., Someya, T., Calisti, M., Laschi, C., Sun, W., Wang, G., Wen, L., Baines, R., Patiballa, S. K., Kramer, R., Rus, D., Fischer, P., Simmel, F., Lendlein, A.
January 2022 (article)
Review of data processing of functional optical microscopy for neuroscience
Benisty, H., Song, A., Mishne, G., Charles, A. S.
Neurophotonics, 9(4):041402, SPIE, Bellingham, WA, USA, 2022 (article)
Emergent dynamics of light-induced active colloids probed by XPCS
Zinn, T., Narayanan, T., Kottapalli, S. N., Sachs, J., Sottmann, T., Fischer, P.
New Journal of Physics, 24(9):093007, IOP Publishing, Bristol, 2022 (article)
2021
Rods in a lyotropic chromonic liquid crystal: emergence of chirality, symmetry-breaking alignment, and caged angular diffusion
Ettinger, S., Dietrich, C. F., Mishra, C. K., Miksch, C., Beller, D. A., Collings, P. J., Yodh, A. G.
Soft Matter, 18(3):487-495 , December 2021 (article)

Following molecular mobility during chemical reactions: no evidence for active propulsion
Fillbrook, L. L., Günther, J., Majer, G., O’Leary, D. J. P. W. S., Van Ryswyk, H., Fischer, P., Beves, J. E.
Journal of the American Chemical Society, 143(49):20884-20890, December 2021 (article)
Optical Activity in Third‐Harmonic Rayleigh Scattering: A New Route for Measuring Chirality
Ohnoutek, L., Jeong, H., Jones, R., Sachs, J., Olohan, B., Rasadean, D., Pantos, G., Andrews, D., Fischer, P., Valev, V.
Laser & Photonics Reviews, 15(11):2100235, September 2021 (article)
Chemically active micromotors
Combinatorial growth of multinary nanostructured thin functional films
Barad, H., Alarcon-Correa, M., Salinas, G., Oren, E., Peter, F., Kuhn, A., Fischer, P.
Materials Today, 50, pages: 89-99, July 2021 (article)
Dynamic Acoustic Levitator Based On Subwavelength Aperture Control
Lu, X., Twiefel, J., Ma, Z., Yu, T., Wallaschek, J., Fischer, P.
Advanced Science, 8(15):2100888, June 2021 (article)
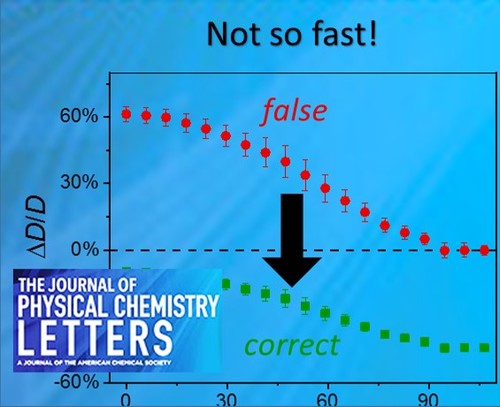
Comment on “Using NMR to Test Molecular Mobility during a Chemical Reaction”
Fillbrook, L. L., Günther, J., Majer, G., Price, W. S., Fischer, P., Beves, J. E.
The Journal of Physical Chemistry Letters, 12(25):5932-5937, June 2021 (article)
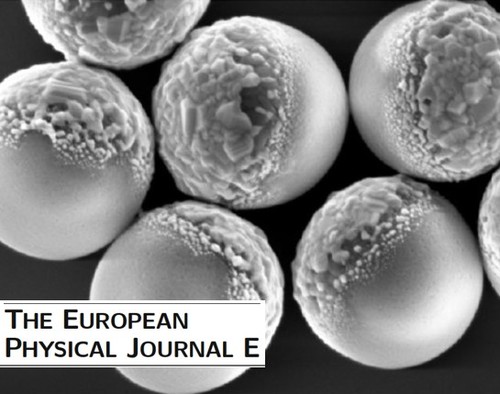
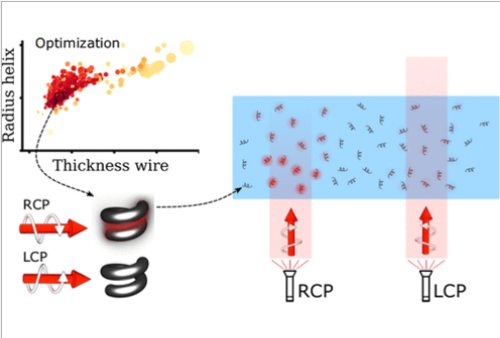
Light- and magnetically actuated FePt microswimmers
Kadiri, V. M., Günther, J., Kottapalli, S. N., Goyal, R., Peter, F., Alarcon-Correa, M., Son, K., Barad, H., Börsch, M., Fischer, P.
The European Physical Journal E, 44(6):74, June 2021 (article)
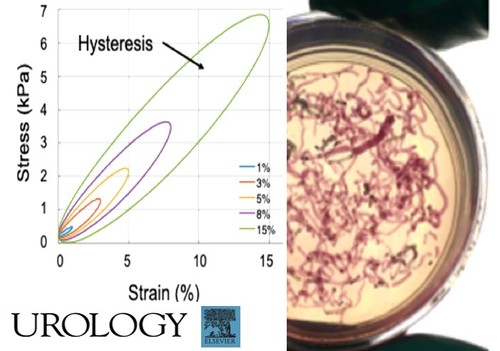
Panoramic imaging assessment of different bladder phantoms – an evaluation study
Hackner, R., Suarez-Ibarrola, I., Qiu, T., Lemke, N., Pohlmann, P., Wilhelm, K., Fischer, P., Miernik, A., Wittenberg, T.
Urology, 156, pages: e103-e110, June 2021 (article)
Soft urinary bladder phantom for endoscopic training
Choi, E., Waldbillig, F., Jeong, M., Li, D., Goyal, R., Weber, P., Miernik, A., Grüne, B., Hein, S., Suarez-Ibarrola, R., Kriegmair, M. C., Qiu, T.
Annals of Biomedical Engineering, 49(9):2412-2420, May 2021 (article)
Large Area Patterning of Nanoparticles and Nanostructures: Current Status and Future Prospects
Barad, H., Kwon, H., Alarcon-Correa, M., Fischer, P.
ACS Nano, 15(4):5861-5875 , April 2021 (article)
Progress in robotics for combating infectious diseases
Gao, A., Murphy, R., Chen, W., Dagnino, G., Fischer, P., Gutierrez, M., Kundrat, D., Nelson, B., Shamsudhin, N., Su, H., Xia, J., Zemmar, A., Zhang, D., Wang, C., Yang, G.
Science Robotics, 6(52):eabf1462, March 2021 (article)
Advanced Diffusion Studies of Active Enzymes and Nanosystems
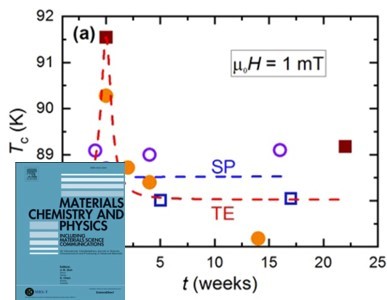
Transient increase of Tc and Jc in superconducting/metallic heterostructures
Ionescu, A., Bihler, M., Simmendinger, J., Miksch, C., Fischer, P., Cristiani, G., Rabinovich, K., Schütz, G., Albrecht, J.
Materials Chemistry and Physics, 263, pages: 124390, February 2021 (article)
Melt Electrospinning Writing of Magnetic Microrobots
Su, Y., Qiu, T., Song, W., Han, X., Sun, M., Wang, Z., Xie, H., Dong, M., Chen, M.
Advanced Science, 8(3):2003177, January 2021 (article)
Tailoring Binding Abilities by Incorporating Oxophilic Transition Metals on 3D Nanostructured Ni Arrays for Accelerated Alkaline Hydrogen Evolution Reaction
Kim, J., Jung, H., Jung, S., Hwang, J., Kim, D. Y., Lee, N., Kim, K., Kwon, H., Kim, Y., Han, J. W., Kim, J. K.
Journal of the American Chemical Society, 143(3):1399-1408, January 2021 (article)
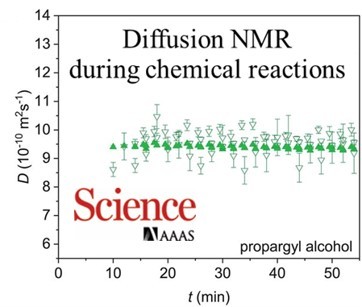
Comment on “Boosted molecular mobility during common chemical reactions”
Günther, J., Fillbrook, L. L., MacDonald, T. S., Majer, G., Price, W. S., Fischer, P., Beves, J. E.
Science, 371(6526):eabe8322, January 2021 (article)
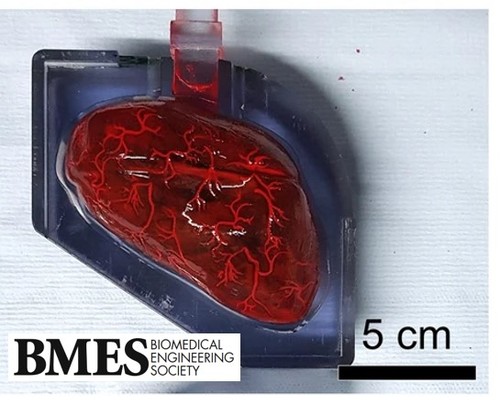
Soft liver phantom with a hollow biliary system
Tan, X., Li, D., Jeong, M., Yu, T., Ma, Z., Afat, S., Grund, K., Qiu, T.
Annals of Biomedical Engineering, 49(9):2139-2149, 2021 (article)
Slippery micropropellers penetrate the vitreous humor
Magnetic field generator
Qiu, T., Fischer, P.
(US20210228298A1), 2021 (patent)
2020
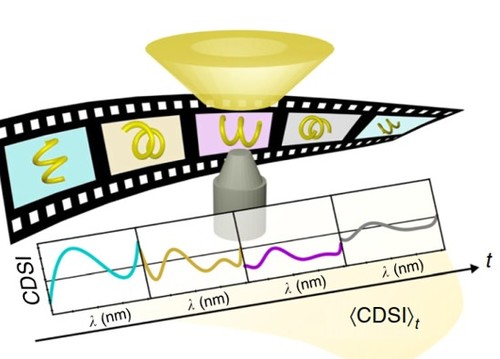
Chiroptical spectroscopy of a freely diffusing single nanoparticle
Sachs, J., Günther, J., Mark, A. G., Fischer, P.
Nature Communications, 11, pages: 4513, September 2020 (article)
A Hierarchical 3D TiO2/Ni Nanostructure as an Efficient Hole‐Extraction and Protection Layer for GaAs Photoanodes
Alqahtani, M., Kafizas, A., Sathasivam, S., Ebaid, M., Cui, F., Alymani, A., Jeong, H., Lee, T., Fischer, P., Parkin, I., Grätzel, M., Wu, J.
ChemSusChem, 13(22):6028-6036, September 2020 (article)
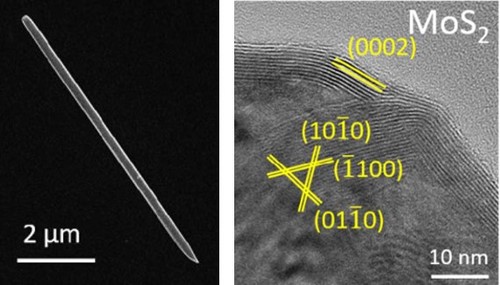
Scalable Fabrication of Molybdenum Disulfide Nanostructures and their Assembly
Huang, Y., Yu, K., Li, H., Liang, Z., Walker, D., Ferreira, P., Fischer, P., Fan, D.
Advanced Materials, 32(43):2003439, September 2020 (article)
Spatial ultrasound modulation by digitally controlling microbubble arrays
Ma, Z., Melde, K., Athanassiadis, A. G., Schau, M., Richter, H., Qiu, T., Fischer, P.
Nature Communications, 11, pages: 4537, September 2020 (article)
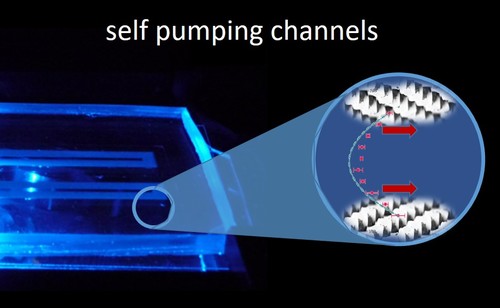
Microchannels with Self-Pumping Walls
Yu, T., Athanassiadis, A. G., Popescu, M. N., Chikkadi, V., Güth, A., Singh, D. P., Qiu, T., Fischer, P.
ACS Nano, 14(10):13673-13680, 2020 (article)
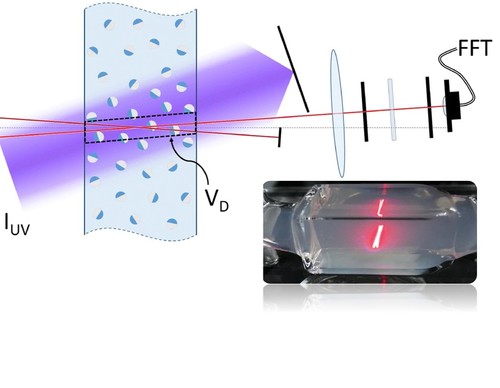
Characterization of active matter in dense suspensions with heterodyne laser Doppler velocimetry
Sachs, J., Kottapalli, S. N., Fischer, P., Botin, D., Palberg, T.
Colloid and Polymer Science, 299(2):269-280, August 2020 (article)

Motion, Symmetry & Spectroscopy of Chiral Nanostructures
Evaluation of nanorobots for targeted delivery into the retina
Schnichels, S., Goyal, R., Hurst, F., Ziemsen, F., Qiu, T., Fischer, P.
61, pages: 1355, Investigative Ophthalmology & Visual Science,The Association for Research in Vision and Ophthalmology, June 2020 (conference)
Biocompatible magnetic micro‐ and nanodevices: Fabrication of FePt nanopropellers and cell transfection
Kadiri, V. M., Bussi, C., Holle, A. W., Son, K., Kwon, H., Schütz, G., Gutierrez, M. G., Fischer, P.
Advanced Materials, 32(25):2001114, Wiley-VCH, Weinheim, May 2020 (article)
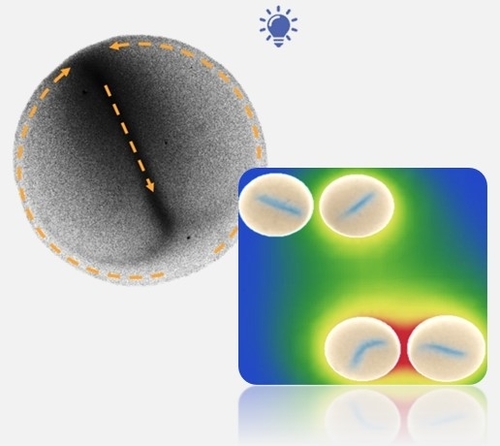
Interface-mediated spontaneous symmetry breaking and mutual communication between drops containing chemically active particles
Singh, D. P., Domínguez, A., Choudhury, U., Kottapalli, S. N., Popescu, M. N., Dietrich, S., Fischer, P.
Nature Communications, 11, pages: 2210, May 2020 (article)
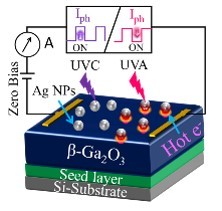
Spectrally selective and highly-sensitive UV photodetection with UV-A, C band specific polarity switching in silver plasmonic nanoparticle enhanced gallium oxide thin-film
Arora, K., Singh, D., Fischer, P., Kumar, M.
Advanced Optical Materials, 8(16):2000212, May 2020 (article)
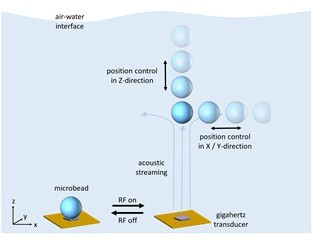
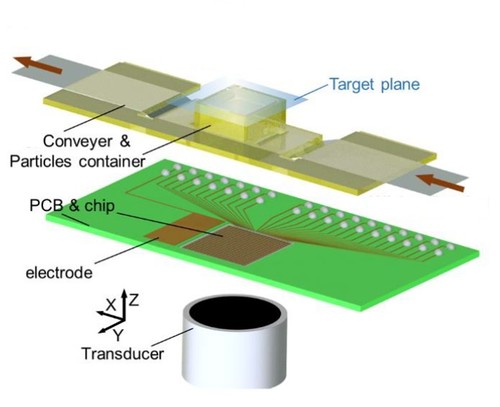
Acoustofluidic Tweezers for the 3D Manipulation of Microparticles
Guo, X., Ma, Z., Goyal, R., Jeong, M., Pang, W., Fischer, P., Dian, X., Qiu, T.
2020 IEEE International Conference on Robotics and Automation (ICRA 2020), pages: 11392-11397, IEEE, Piscataway, NJ, IEEE International Conference on Robotics and Automation (ICRA 2020), 2020 (conference)
Investigating photoresponsivity of graphene-silver hybrid nanomaterials in the ultraviolet
Deshpande, P., Suri, P., Jeong, H., Fischer, P., Ghosh, A., Ghosh, G.
Journal of Chemical Physics, 152(4):044709, January 2020 (article)
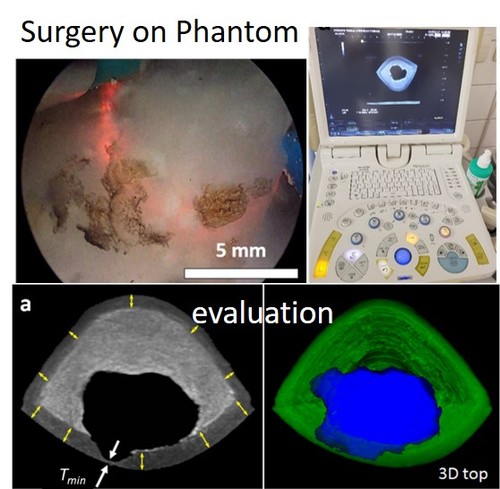
A High-Fidelity Phantom for the Simulation and Quantitative Evaluation of Transurethral Resection of the Prostate
Choi, E., Adams, F., Gengenbacher, A., Schlager, D., Palagi, S., Müller, P., Wetterauer, U., Miernik, A., Fischer, P., Qiu, T.
Annals of Biomedical Engineering, 48(1):437-446, January 2020 (article)

Vision Statement: Interactive Materials–Drivers of Future Robotic Systems