Acoustofluidic Tweezers for the 3D Manipulation of Microparticles
2020
Conference Paper
pf
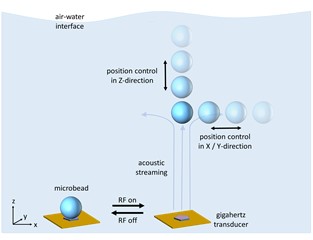
Non-contact manipulation is of great importance in the actuation of micro-robotics. It is challenging to contactless manipulate micro-scale objects over large spatial distance in fluid. Here, we describe a novel approach for the dynamic position control of microparticles in three-dimensional (3D) space, based on high-speed acoustic streaming generated by a micro-fabricated gigahertz transducer. Due to the vertical lifting force and the horizontal centripetal force generated by the streaming, microparticles are able to be stably trapped at a position far away from the transducer surface, and to be manipulated over centimeter distance in all three directions. Only the hydrodynamic force is utilized in the system for particle manipulation, making it a versatile tool regardless the material properties of the trapped particle. The system shows high reliability and manipulation velocity, revealing its potentials for the applications in robotics and automation at small scales.
| Author(s): | Guo, Xinxi and Ma, Zhichao and Goyal, Rahul and Jeong, Moon-Kwang and Pang, Wei and Fischer, Peer and Dian, Xuexin and Qiu, Tian |
| Book Title: | 2020 IEEE International Conference on Robotics and Automation (ICRA 2020) |
| Pages: | 11392--11397 |
| Year: | 2020 |
| Publisher: | IEEE |
| Department(s): | Micro, Nano, and Molecular Systems |
| Bibtex Type: | Conference Paper (conference) |
| DOI: | 10.1109/ICRA40945.2020.9197265 |
| Event Name: | IEEE International Conference on Robotics and Automation (ICRA 2020) |
| Event Place: | Paris |
| Address: | Piscataway, NJ |
| ISBN: | 978-1-7281-7395-5 |
|
BibTex @conference{2020Xinyi,
title = {Acoustofluidic Tweezers for the 3D Manipulation of Microparticles},
author = {Guo, Xinxi and Ma, Zhichao and Goyal, Rahul and Jeong, Moon-Kwang and Pang, Wei and Fischer, Peer and Dian, Xuexin and Qiu, Tian},
booktitle = {2020 IEEE International Conference on Robotics and Automation (ICRA 2020)},
pages = {11392--11397},
publisher = {IEEE},
address = {Piscataway, NJ},
year = {2020},
doi = {10.1109/ICRA40945.2020.9197265}
}
|
|