Small-scale robot and miniaturized medical instrument are actuated wirelessly by acoustic active surfaces
Ultrasound-powered Robotic Actuation Systems
Tian Qiu, Stefano Palagi, Kai Melde, Peer Fischer
Collaborators: Dr. med. Fabian Adams, Department Urology, Medical Center - University of Freiburg
We have developed a wireless arm that has many-of-degree of freedoms and responds to ultrasound. It has been used for minimally invasive imaging.
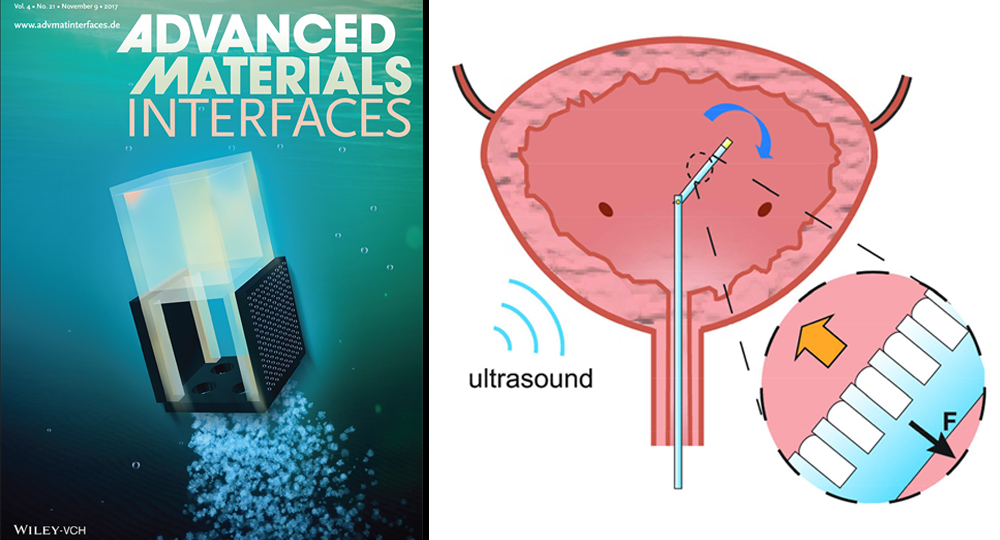
A major obstacle towards the miniaturization of micro-devices is the lack of efficient methods to power and actuate them. Current micro-actuators and batteries are still cumbersome and often take most of the volume of small devices. Acoustic energy holds great potential, as it can wirelessly power and actuate micro-devices, potentially also through biological tissues. However, it is still challenging to effectively convert mechanical vibrations into directional forces.
We recently demonstrate and patented a new concept of wireless acoustic actuation. We use acoustic functional interfaces that consist of two-dimensional arrays of micro-bubbles in water. At resonance with the external acoustic fields, the bubble oscillations lead to water streaming, thus providing highly directional propulsive forces. Since one micro-bubble exerts only a tiny force, we use microfabrication methods to arrange thousands of them on the surface of the robot arm. The resonance frequency is a function of the bubble size, so we can equip miniaturized endoscopes with different surfaces and thus enable more than 10 degrees of freedom operation. We demonstrated this new idea by moving a wireless endoscope arm holding a miniature camera that imaged the inside of a bladder. The new actuation scheme is easy to scale-down and works wirelessly under water, and we are working on applications in small-scale robotics and medical instruments.
Tian Qiu, Fabian Adams, Stefano Palagi , Kai Melde, Andrew Mark, Ulrich Wetterauer, Arkadiusz Miernik, and Peer Fischer, Wireless Acoustic-Surface Actuators for Miniaturized Endoscopes, ACS Applied Materials and Interfaces, 2017, 9 (49), pp 42536–42543 (equal contribution)
T. Qiu, S. Palagi, A.G. Mark, K. Melde, F. Adams, P. Fischer, Active Acoustic Surfaces Enable the Propulsion of a Wireless Robot, Advanced Materials Interfaces, Volume 4, Issue 21, 1700933 (2017).
T. Qiu, S. Palagi, A.G. Mark, K. Melde, F. Adams, P. Fischer, Wireless Actuation with Functional Acoustic Surfaces, Applied Physics Letters, 109, 191602 (2016).





