Soft microswimmers
Stefano Palagi, Tian Qiu, Eunjin Choi, Alexander von Rohr, Peer Fischer
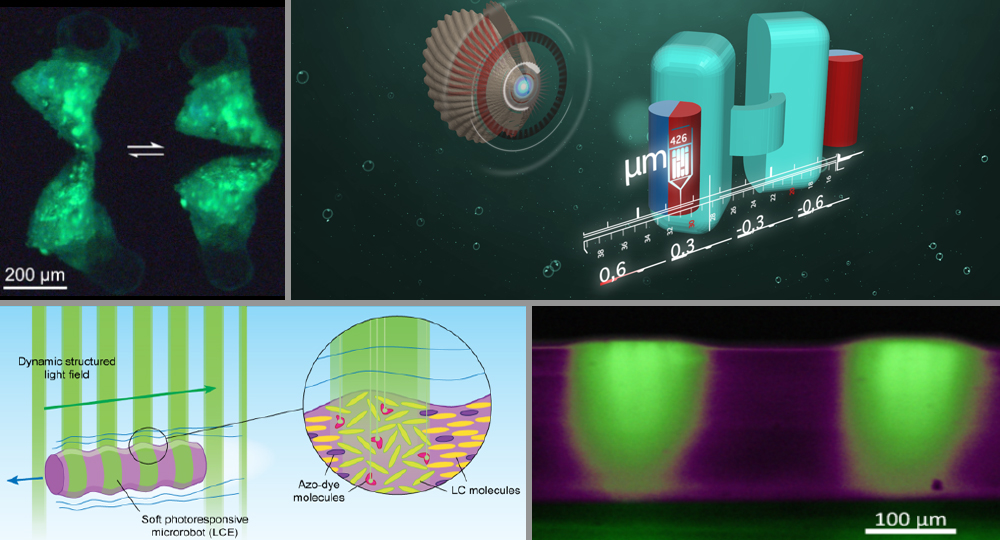
We are interested in the development and operation of robotic devices at very small scales, including structures that can swim. Recently we have built the smallest artificial microswimmer – a soft microrobot – capable of self-propulsion using only body-shape changes, i.e. no external forces or torques. Using molecular switches and dyes and structured light permits us to reversibly deform a body made from a liquid crystal elastomer so that it swims. Similarly, we have used soft materials to realize the first reciprocal swimmer. Our research effort in this area aims to develop new mechanisms that can be used to build and operate microrobots. We address fundamental questions and explore applications in minimally invasive medicine.
Realizing devices that possess robotic functionalities at these small scales is challenging, as no sensors, actuators, controllers, or even mechanisms exist that can be used to build microswimmers and robots. Most artificial microrobots so far consist of monolithic structures that are moved by external fields. This calls for radically new solutions. Molecular materials can be used to endow microrobots with robotic functionalities. For example, elastomers and other flexible materials can obviate the need for joints and mechanisms. This approach has allowed us to develop microrobots that can deform under the action of external magnetic fields, and consequently propel and swim in different environments – from simple liquids to non-Newtonian fluids similar to bodily liquids [1].
[1] "Swimming by Reciprocal Motion at Low Reynolds Number", Tian Qiu, Tung-Chun Lee, Andrew G. Mark, Konstantin I. Morozov, Raphael Münster, Otto Mierka, Stefan Turek, Alexander M. Leshansky, and Peer Fischer, Nature Comm. 5: 5119 (2014).
[2] Chapter 8 – Micro- and nanorobots in Newtonian and biological viscoelastic fluids”, Stefano Palagi, Debora Walker, Tian Qiu, Peer Fischer, Microbiorobotics (Second edition), Biologically Inspired Microscale Robotic Systems. Pages 133–162, DOI: https://doi.org/10.1016/B978-0-32-342993-1.00015-X, March 24 (2017).
[3] “Structured light enables biomimetic swimming and versatile locomotion of photo-responsive soft microrobots”, S. Palagi, A. G. Mark, S. Y. Reigh, K. Melde, T. Qiu, H. Zeng, C. Parmeggiani, D. Martella, A. S. Castillo, N. Kapernaum, F. Giesselmann, D. S. Wiersma, E. Lauga, and P. Fischer, Nature Materials 15, 647–653 (2016) doi:10.1038/nmat4569.
[4] “Locomotion of light-driven soft microrobots through a hydrogel via local melting”, S. Palagi and A. G. Mark and K. Melde and T. Qiu and H. Zeng and C. Parmeggiani and D. Martella and D. S. Wiersma and P. Fischer, IEEE, DOI:10.1109/MARSS.2017.8001916, July 17-21 (2017).







