A Helical Microrobot with an Optimized Propeller-Shape for Propulsion in Viscoelastic Biological Media
2019
Article
pf
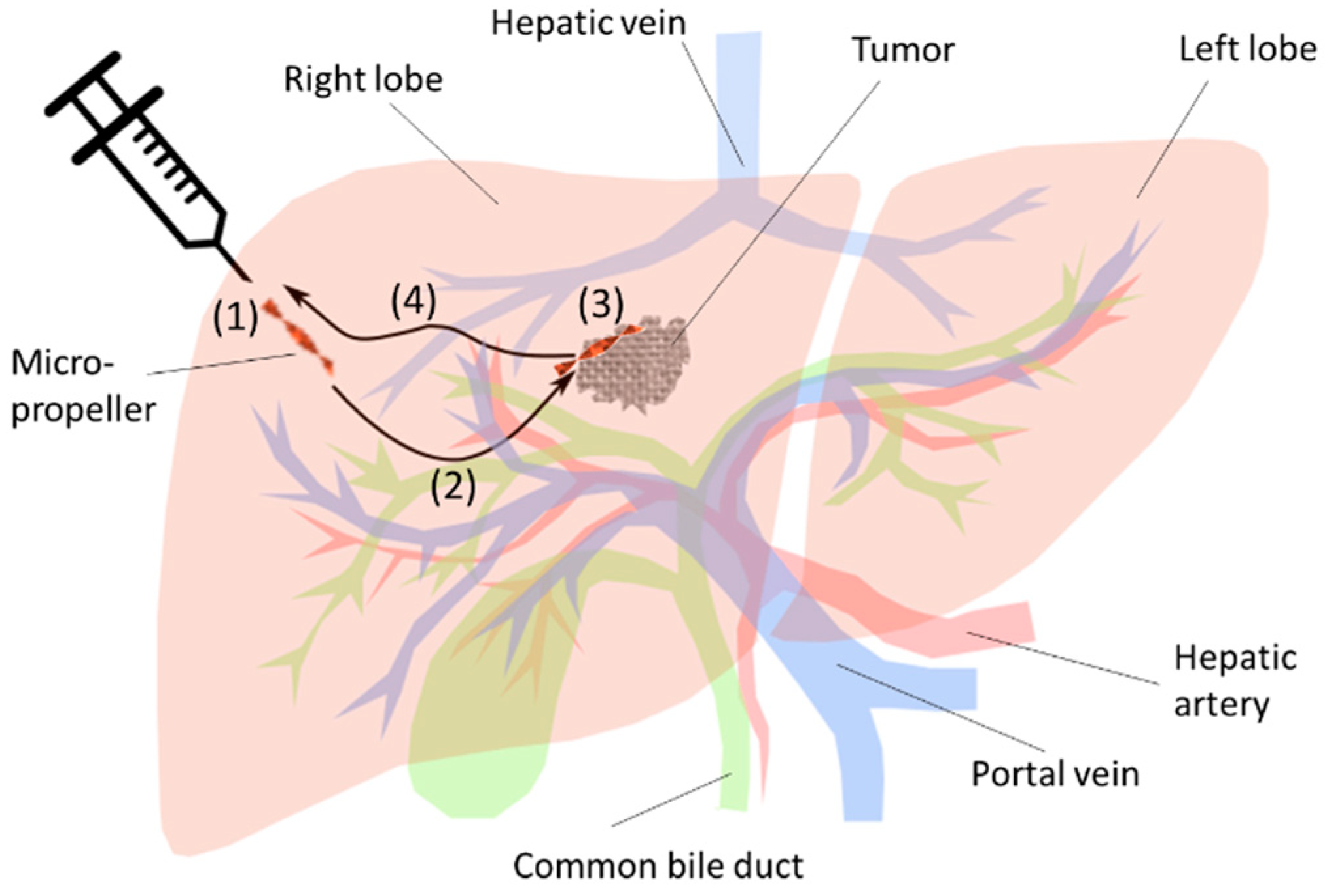
One major challenge for microrobots is to penetrate and effectively move through viscoelastic biological tissues. Most existing microrobots can only propel in viscous liquids. Recent advances demonstrate that sub-micron robots can actively penetrate nanoporous biological tissue, such as the vitreous of the eye. However, it is still difficult to propel a micron-sized device through dense biological tissue. Here, we report that a special twisted helical shape together with a high aspect ratio in cross-section permit a microrobot with a diameter of hundreds-of-micrometers to move through mouse liver tissue. The helical microrobot is driven by a rotating magnetic field and localized by ultrasound imaging inside the tissue. The twisted ribbon is made of molybdenum and a sharp tip is chemically etched to generate a higher pressure at the edge of the propeller to break the biopolymeric network of the dense tissue.
| Author(s): | Li., D. and Jeong, M. and Oren, E. and Yu, T. and Qiu, T. |
| Journal: | Robotics |
| Volume: | 8 |
| Pages: | 87 |
| Year: | 2019 |
| Month: | October |
| Day: | 15 |
| Publisher: | MDPI |
| Department(s): | Micro, Nano, and Molecular Systems |
| Bibtex Type: | Article (article) |
| Paper Type: | Journal |
| DOI: | https://doi.org/10.3390/robotics8040087 |
| URL: | https://www.mdpi.com/2218-6581/8/4/87/htm |
|
BibTex @article{Li2019b,
title = {A Helical Microrobot with an Optimized Propeller-Shape for Propulsion in Viscoelastic Biological Media},
author = {Li., D. and Jeong, M. and Oren, E. and Yu, T. and Qiu, T.},
journal = {Robotics},
volume = {8},
pages = {87},
publisher = {MDPI},
month = oct,
year = {2019},
doi = {https://doi.org/10.3390/robotics8040087},
url = {https://www.mdpi.com/2218-6581/8/4/87/htm},
month_numeric = {10}
}
|
|