Augmenting Human Policies using Riemannian Metrics for Human-Robot Shared Control
2023
Conference Paper
hi
zwe-sw
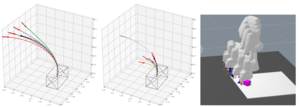
We present a shared control framework for teleoperation that combines the human and autonomous robot agents operating in different dimension spaces. The shared control problem is an optimization problem to maximize the human's internal action-value function while guaranteeing that the shared control policy is close to the autonomous robot policy. This results in a state update rule that augments the human controls using the Riemannian metric that emerges from computing the curvature of the robot's value function to account for any cost terms or constraints that the human operator may neglect when operating a redundant manipulator. In our experiments, we apply Linear Quadratic Regulators to locally approximate the robot policy using a single optimized robot trajectory, thereby preventing the need for an optimization step at each time step to determine the optimal policy. We show preliminary results of reach-and-grasp teleoperation tasks with a simulated human policy and a pilot user study using the VR headset and controllers. However, the mixed user preference ratings and quantitative results show that more investigation is required to prove the efficacy of the proposed paradigm.
| Author(s): | Yoojin Oh and Jean-Claude Passy and Jim Mainprice |
| Book Title: | Proceedings of the IEEE International Symposium on Robot and Human Interactive Communication (RO-MAN) |
| Pages: | 1612--1618 |
| Year: | 2023 |
| Month: | August |
| Department(s): | Haptic Intelligence, Software Workshop |
| Bibtex Type: | Conference Paper (inproceedings) |
| Paper Type: | Conference |
| DOI: | 10.1109/RO-MAN57019.2023.10309363 |
| Address: | Busan, Korea |
| State: | Published |
|
BibTex @inproceedings{Oh23-ROMAN-Control,
title = {Augmenting Human Policies using Riemannian Metrics for Human-Robot Shared Control},
author = {Oh, Yoojin and Passy, Jean-Claude and Mainprice, Jim},
booktitle = {Proceedings of the IEEE International Symposium on Robot and Human Interactive Communication (RO-MAN)},
pages = {1612--1618},
address = {Busan, Korea},
month = aug,
year = {2023},
doi = {10.1109/RO-MAN57019.2023.10309363},
month_numeric = {8}
}
|
|